Los integrantes del Laboratorio de Robótica y Sistemas Embebidos desarrollaron dos prototipos de vehículos aéreos no tripulados (VANTs) que pudieron testearse con eficiencia en tres áreas protegidas de la Argentina (Parque Nacional Nahuel Huapi, Parque Nacional Ciervo de los Pantanos y Reserva Ecológica Ciudad Universitaria-Costanera Norte). Mediante técnicas de geolocalización y fotogrametría aérea, lograron calcular parámetros estructurales de los bosques e identificar las zonas de extracción ilegal. El desafío actual es incluir mayor capacidad de sensado en los vehículos e incorporar mejores algoritmos para la detección automática de tala selectiva.
En la actualidad, relevar y monitorear especies de bosques nativos con nivel de detalle, es una actividad compleja que permite conocer características estructurales de los bosques tales como la altura de las copas, la cobertura del suelo, calcular sus índices de vegetación e identificar lugares donde está habiendo una tala no autorizada y, al mismo tiempo, indiscriminada. Dada la vasta extensión de los bosques nativos de Argentina, que comprende miles de kilómetros cuadrados, y la variedad de especies en peligro que existen, se requieren nuevos métodos para hacer eficiente el monitoreo de estas regiones. A su vez, las metodologías tradicionales de procesamiento de imágenes satelitales así como del trabajo de campo llevado a cabo manualmente por ingenieros forestales, presentan importantes limitaciones de tiempo y cobertura y son muy costosas de realizar.
 Con este fin, investigadores del Laboratorio de Robótica y Sistemas Embebidos del ICC desarrollan un proyecto de Monitoreo de Bosques Nativos utilizando vehículos aéreos no tripulados (VANTs o drones) de ala fija (ver nota anterior del ICC). El proyecto tiene como propósitos: 1) Diseñar y construir VANTs que puedan volar de manera autónoma y relevar una zona protegida. 2) Desarrollar algoritmos de imágenes y visión por computadora para procesar los datos capturados por los VANTs. 3) Obtener una metodología que permite el aprovechamiento forestal de los bosques de Argentina.
Con este fin, investigadores del Laboratorio de Robótica y Sistemas Embebidos del ICC desarrollan un proyecto de Monitoreo de Bosques Nativos utilizando vehículos aéreos no tripulados (VANTs o drones) de ala fija (ver nota anterior del ICC). El proyecto tiene como propósitos: 1) Diseñar y construir VANTs que puedan volar de manera autónoma y relevar una zona protegida. 2) Desarrollar algoritmos de imágenes y visión por computadora para procesar los datos capturados por los VANTs. 3) Obtener una metodología que permite el aprovechamiento forestal de los bosques de Argentina.
Durante la cuarta edición del Día de la Investigación en Ciencias de la Computación, realizada el 18 de marzo de 2022, el investigador Pablo De Cristóforis expuso el estado actual y los avances del proyecto en su charla “Mapeo de bosques utilizando vehículos aéreos no tripulados”. La última publicación científica del proyecto está disponible en el journal Forests. En este contexto, entrevistamos a De Cristóforis sobre las principales novedades de este destacado trabajo de investigación.
¿Qué características tienen los prototipos de los VANTs desarrollados por tu grupo en el Laboratorio de Robótica y qué performance de vuelo observaron hasta ahora?
Los dos VANTs que construimos son prototipos, ninguno es una versión final a nivel de un producto comercial, que tampoco existe para la aplicación en cuestión (mapeo de bosques). Se optó por fuselajes livianos de tipo ala fija construidos en material EPO y fibra de carbono. A diferencia de los VANT de tipo multicóptero, los de ala fija presentan mayor autonomía de vuelo y capacidad de carga, características fundamentales para nosotros. Aunque también se probaron multicópteros para áreas de relevamiento de menor dimensión.
Se construyeron dos VANTS basados en dos modelos de fuselaje distintos: en primer lugar construimos Chimuelo, basado en el fuselaje Skywalker X5, que es de tipo ala volante (sin cola), de 1180mm de envergadura y 1020mm de longitud y en segundo lugar construimos Gasparín, basado en el fuselaje Skywalker 1900, que es de ala fija alta (con cola), de 1900mm de envergadura y 1180mm de longitud. Ambos fuselajes poseen una cabina que admite una carga útil de entre 500g y 700g, pero esto depende de la configuración de motor y hélice que se utilice. Los VANTs incluyen además un autopiloto, las baterías, la cámara digital, diversos sensores, componentes de comunicación y actuadores.
Luego de realizarse pruebas de vuelo con ambos VANTs basados en sendos fuselajes se encontraron ventajas comparativas del Skywalker 1900 por sobre el X5, es decir, el segundo que construimos respecto del primero. En primer lugar, el Skywalker 1900 presenta un vuelo más lento y estable debido a su mayor envergadura. Esto facilita considerablemente alcanzar el vuelo autónomo y también minimiza los movimientos en vuelo que puedan generar un desenfoque (motion blur) de las imágenes adquiridas. En segundo lugar, con el fuselaje Skywaler X5, se requiere de una catapulta o un elástico que permita proporcionarle la velocidad mínima de vuelo en un tiempo suficiente corto para lograr el despegue, mientras que con el Skywalker 1900 se puede hacer un lanzamiento directamente con la mano, ya que su velocidad mínima de sustentación es mucho menor. En tercer lugar, la capacidad de carga y la autonomía de vuelo son superiores en el caso del Skywalker 1900. Por estas razones actualmente seguimos trabajando con un VANT basado en este fuselaje.
¿Cuáles son los problemas de procesamiento de imágenes en un dominio tan particular como el de los bosques y en qué consiste el Modelo Digital del Terreno que proponen para este entorno?
Uno de los problemas que encontramos es que para estimar correctamente los parámetros estructurales de los bosques necesitamos conocer con precisión la altura de los árboles. Por ese motivo se necesita un Modelo Digital del Terreno (DTM), que también sea preciso. Para construir un DTM es necesario poder sensar el terreno, pero cuando se trabaja con cámaras digitales (lo que se conoce como fotogrametría aérea) en ambientes boscosos no siempre es posible. En las imágenes capturadas se pueden observar las copas de los árboles, pero cuando éstas se encuentran muy cercanas entre sí, ocluyen el suelo.
Para lidiar con esto se propuso un algoritmo novedoso de generación de DTMs precisos en entornos forestales utilizando solo la nube de puntos característicos extraídos de las imágenes y calculada siguiendo el método de Structure from Motion, lo que reduce considerablemente el costo en comparación con los enfoques orientados a LIDAR. A diferencia de ellos, considera los espacios vacíos que normalmente se encuentran en las nubes de puntos durante el proceso de clasificación suelo vs. no-suelo y extiende el modelo del suelo utilizando la técnica de Random sample consensus (RANSAC). En base a este algoritmo de generación de DTMs precisos se propone la estimación de parámetros forestales estructurales y la detección automática de tala selectiva.
¿Qué resultados preliminares han podido recolectar sobre el mapeo en los bosques analizados en esta última etapa de trabajo?
Hasta ahora se trabajó en zonas de tres áreas protegidas: Parque Nacional Nahuel Huapi, Parque Nacional Ciervo de los Pantanos y Reserva Ecológica Ciudad Universitaria-Costanera Norte. En todos los casos pudimos corroborar la factibilidad de la metodología propuesta para el relevamiento y monitoreo de bosques utilizando VANTs y fotogrametría aérea. Se pudieron calcular parámetros estructurales de los bosques pertenecientes a estas áreas relevadas, como la altura de los árboles, el porcentaje de cobertura de las copas, la segmentación en estratos arbóreos y la detección de tala o extracción de individuos. Esto último tiene un gran interés debido a la necesidad de monitorear la poda ilegal en áreas protegidas.
Lamentablemente la pandemia imposibilitó la realización de tareas de campo en los últimos dos años, con lo cual nuestro primer objetivo ahora es poner en condiciones operativas nuevamente los VANTs desarrollados y volver a las áreas ya relevadas para poder volver a mapear los bosques y probar nuestros algoritmos de detección de cambios en las zonas de interés.
Por último, ¿podrías comentar sobre cómo sería el trabajo a futuro en términos del desarrollo y entrenamiento de algoritmos de machine learning para el reconocimiento e identificación de especies?
A futuro tenemos pensado incluir mayor capacidad de sensado en los VANTs, en particular incorporar una cámara multiespectral con el fin de adquirir imágenes en distintos rangos del espectro electromagnético. De esta forma se puede adquirir mucha más información que la que obtenemos ahora en el espectro visible. Con esta información se pueden aplicar algoritmos de machine learning, en particular estamos pensando en utilizar redes neuronales convolucionales (deep learning), ya que han dado los mejores resultados hasta el momento en el estado del arte. Lo que buscamos es que el sistema aprenda a identificar especies a partir de un conjunto de datos ya etiquetado por especialistas que conocen el terreno (por ejemplo, guardaparques). Un sistema con estas características resultaría de gran interés ya que clasificar y monitorear especies permite analizar cómo afectan las especies exóticas en los bosques nativos de nuestro país.
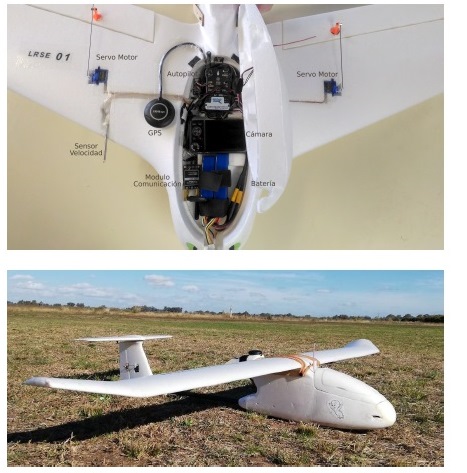
Los dos prototipos: Chimuelo y Gasparín.
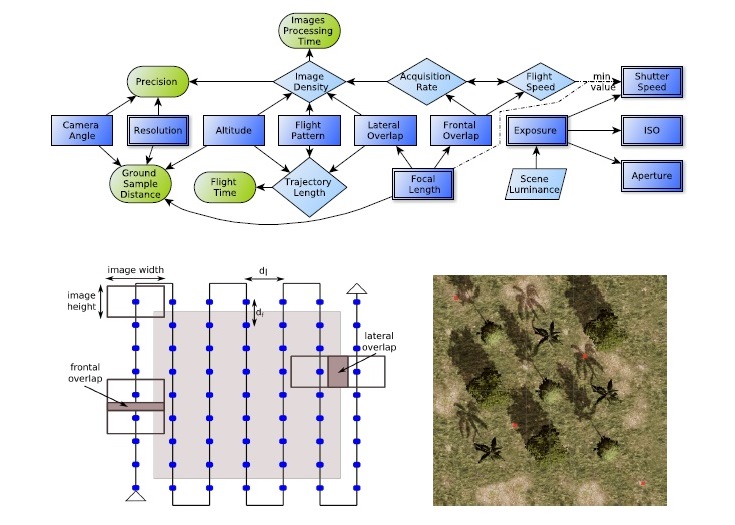
Configuración de parámetros de vuelo y del sensor
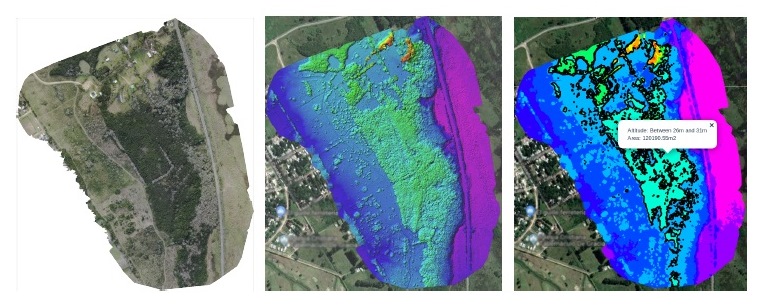
Construcción de un ortomosaico y un mapa 3D
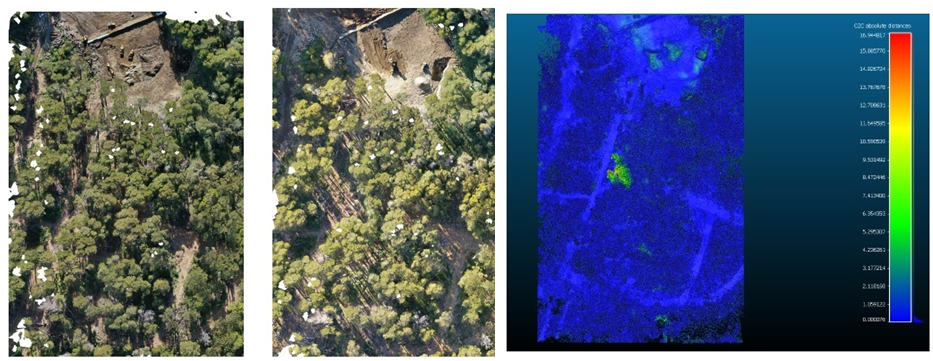
Detección de cambios